首页
交流分享
积分规则
创作分成
隐私政策
免责声明
电子工程师在线工具
New
发布
开通会员
黄金会员
全站资源约8折购买
部分内容免费阅读
VIP用户专属版块
开通黄金会员
钻石会员
全站资源约6折购买
部分内容免费阅读
VIP用户专属版块
一对一技术指导
开通钻石会员
简体中文
繁体中文
English
한국어
日本語
Français
Italiano
Deutsch
Русский
开通会员 尊享会员权益
登录
注册
找回密码
简体中文
繁体中文
English
한국어
日本語
Français
Italiano
Deutsch
Русский
首页
交流分享
积分规则
创作分成
隐私政策
免责声明
电子工程师在线工具
New
开通会员 尊享会员权益
登录
注册
找回密码
分享
FPGA CPLD
FPGA CPLD资料源码分享
帖子 314
互动 415
关注 37
2名版主
发布
全部
最新发布
最新回复
热门
精华
chipdebug
4年前更新
41次阅读
关注
PCIe扫盲——两种中断传递方式
PCIe
为了能够让一些优先级高的事务得到优先处理,PCI总线支持外设中断用以提高总线性能。PCIe总线继承了PCI总线的所有中断特性(...
评分
回复
分享
chipdebug
4年前更新
67次阅读
关注
PCIe扫盲——中断机制介绍(INTx)
PCIe
一个简单的PCI总线INTx中断实现流程,如下图所示。
1. 首先,PCI设备通过INTx边带信号产生中断请求,经过中断控制器(In...
+9
评分
回复
分享
chipdebug
4年前更新
45次阅读
关注
PCIe扫盲——中断机制介绍(MSI)
PCIe
前面的文章中介绍过,MSI本质上是一种Memory Write,和PCIe总线中的Message概念半毛钱关系都没有。并且,MSI的Data Payload也是...
+1
评分
回复
分享
chipdebug
4年前更新
70次阅读
关注
PCIe扫盲——复位机制介绍(Fundamental Hot)
PCIe
PCIe总线中定义了四种复位名称:冷复位(Cold Reset)、暖复位(Warm Reset)、热复位(Hot Reset)和功能层复位(Function-Leve...
+1
评分
回复
分享
chipdebug
4年前更新
67次阅读
关注
PCIe扫盲——复位机制介绍(FLR)
PCIe
PCIe总线自V2.0加入了功能层复位(Function Level Reset,FLR)的功能。该功能主要针对的是支持多个功能的PCIe设备(Multi-Fun P...
评分
回复
分享
chipdebug
4年前更新
91次阅读
关注
PCIe扫盲——热插拔简要介绍
PCIe
某些特殊的应用场合可能要求PCIe设备能够以高可靠性持续不间断运行,为此,PCIe总线采用热插拔(Hot Plug)和热切换(Hot Swap)...
1
回复
分享
chipdebug
4年前更新
51次阅读
关注
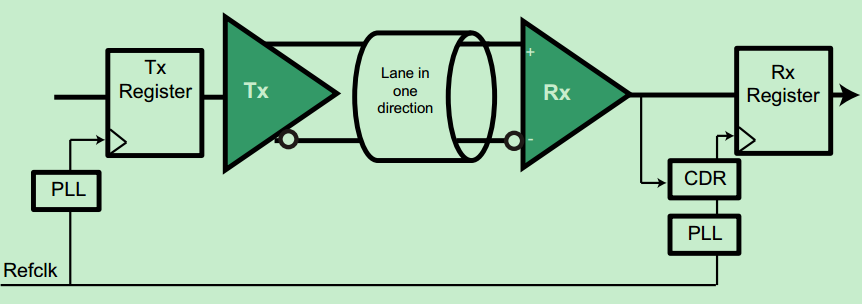
PCIe扫盲——PCI Express物理层接口(PIPE)
PCIe
PCIe物理层接口(Physical Interface for PCI Express,PIPE)定义了物理层中的,媒介层(Media Access Layer,MAC)和物理编码...
1
回复
分享
chipdebug
4年前更新
100次阅读
关注
PCIe扫盲——弹性缓存(Elastic Buffer/ CTC Buffer)
PCIe
前面在介绍PCIe物理层逻辑子层的文章中,有提到过弹性缓存(Elastic Buffer,又称为CTC Buffer或者Synchronization Buffer)...
评分
回复
分享
chipdebug
4年前更新
72次阅读
关注
PCIe扫盲——PCIe配置空间寄存器快速定位表
PCIe
PCI Express的配置空间结构图如下图所示,为了能够快速定位相关寄存器的描述在PCIe Spec中的位置,整理了一个表格,顺便分享到我...
评分
回复
分享
chipdebug
4年前更新
85次阅读
关注
PCIe扫盲——Power Management概述(一)
PCIe
PCIe总线定义的与功耗管理功能(Power Management,PM)相关的主要有:PCI-Compatible PM、Native PCIe Extensions、Bandwith Ma...
+15
评分
回复
分享
chipdebug
4年前更新
77次阅读
关注
PCIe扫盲——Power Management概述(二)——链路唤醒与PME产生
PCIe
链路唤醒机制可以让处于非D0状态的Endpoint,通过唤醒来请求Root(软件层)让其返回D0状态。PCIe PM的软件层和PCI PM是兼容的,...
1
回复
分享
chipdebug
4年前更新
185次阅读
关注
PCIe扫盲——PCIe卡Spec(CEM)导读
PCIe
前面的文章介绍过,PCIe总线除了有Base Spec,还有关于PCIe卡的Spec(又称为CEM Spec,全称为PCI Express Card Electromechanica...
+5
1
回复
分享
chipdebug
4年前更新
133次阅读
关注
PCIe扫盲——基于WinDriver快速开发PCIe驱动简明教程
PCIe
本文将简要介绍如何使用Jungo公司的WinDriver工具快速开发PCI Express设备驱动,以及相关注意事项。本文所使用的的测试平台信息...
+11
评分
回复
分享
chipdebug
4年前更新
75次阅读
关注
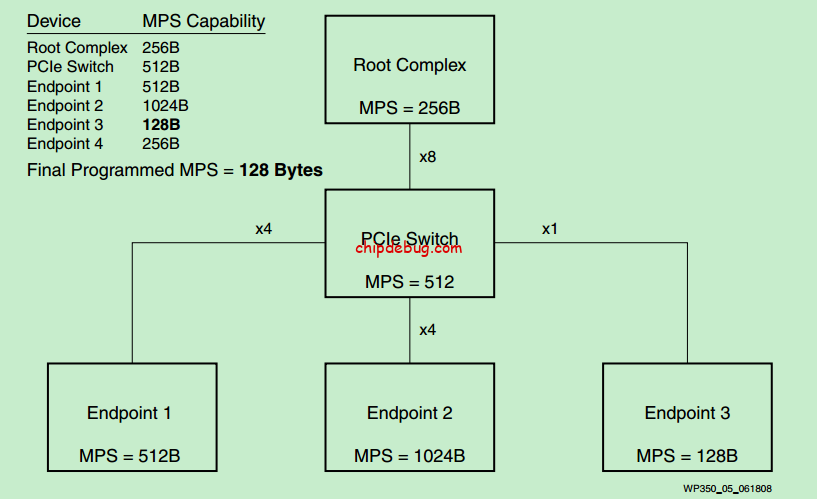
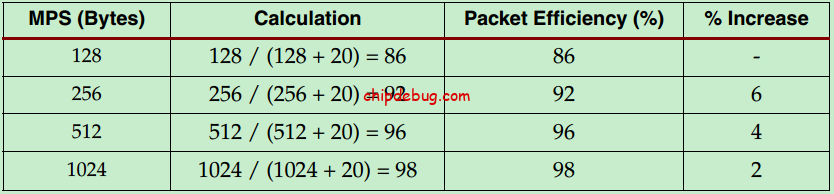
PCIe扫盲——PCIe总线性能评估(有效数据速率估算)
PCIe
前面的文章提到过PCIe总线(Gen1&Gen2)采用了8b/10b编码,因此其有效数据速率为物理线路上的速率的80%。即Gen1的有效速...
+6
评分
回复
分享
chipdebug
4年前更新
363次阅读
关注
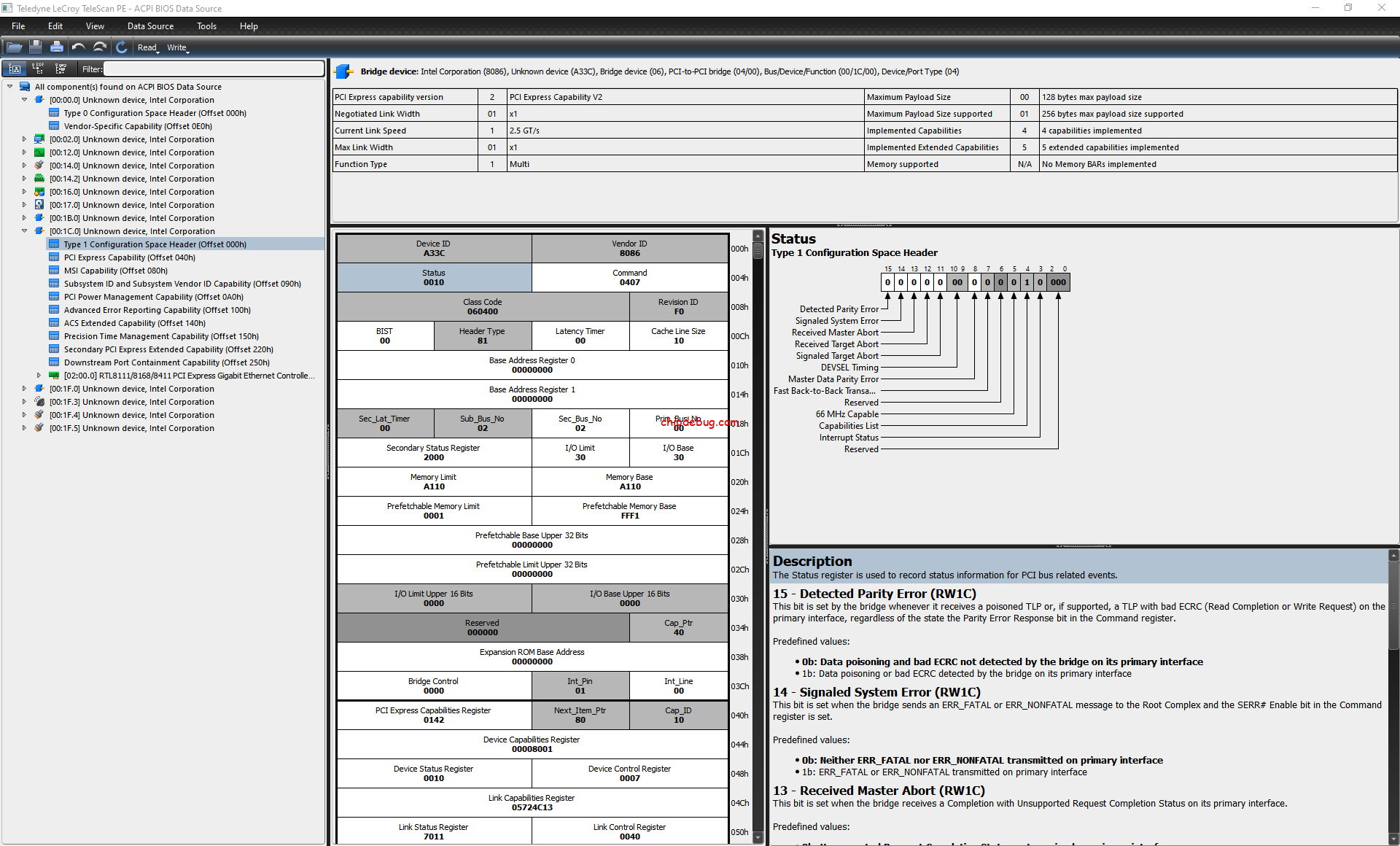
推荐两个实用的PCIe工具软件
PCIe
本文向大家推荐两个实用的PCIe相关的工具软件,Mindshare的Arbor和Teledyne LeCroy的TeleScan PE。
1. Mindshare Arbor
Mindshar...
1
回复
分享
chipdebug
4年前更新
99次阅读
关注
PCIe扫盲——关于PCIe参考时钟的讨论
PCIe
本文来聊一聊PCIe系统中的参考时钟,主要参考资料为PCIe Base Spec和CEM Spec。在1.0a和1.1版本的PCIe Base Spec中并没有详...
+2
评分
回复
分享
chipdebug
4年前更新
162次阅读
关注
PCIe扫盲——128/130b编码详解
PCIe
前面的文章介绍过PCIe的Gen1和Gen2模式下,物理层使用的是8b/10b的编码。这种编码方式能够实现直流均衡,并且能将数据流中的...
+2
评分
回复
分享
chipdebug
4年前更新
20次阅读
关注
PCIe V1.1/V2.1/V3.0 Changes Overview
PCIe
本文将简要地介绍PCIe V1.1相对于V1.0a的主要更新,V2.1相对于V2.0的主要更新,V3.0相对于V2.1的主要更新。主要参考资料来自于Mi...
评分
回复
分享
chipdebug
4年前更新
87次阅读
关注
PCIe扫盲——M-PCIe与MIPI M-PHY
PCIe
M-PCIe即Mobile PCIe,主要应用对象是智能手机等嵌入式设备。PCI-SIG在PCIe Spec V3.1中引入基于MIPI M-PHY v2.0的M-PCIe。相比...
+1
评分
回复
分享
chipdebug
4年前更新
121次阅读
关注
PCIe扫盲——ReTimer和ReDriver简介
PCIe
自2019年下半年,PCIe Gen5正式发布以来,其单个Lane/Channel速率已达32Gbps,传统的FR4电路板支持这么高的速率是完全不可能...
+3
评分
回复
分享
chipdebug
4年前更新
50次阅读
关注
PCIe扫盲——PCIe演进方向?CCIX简介
PCIe
摩尔定律逐渐降速,业界需要一同寻找提升计算性能、同时保持低功耗的方法。CCIX联盟的成立旨在实现一种新型互联,专注于新兴的加...
+1
评分
回复
分享
chipdebug
4年前更新
25次阅读
关注
GenZ,CXL,NVLINK,OpenCAPI,CCIX乱战
PCIe
纵观数据中心业界,底层技术方面其实正处在一场架构变革的初始点,这场变革就是I/O总线的网络化以及I/O资源的大规模池化。众所周知,在开放平台下,PCIE是目前高性能I/O设备普遍采用的总线类型,目前已经到Gen4,很快会到Gen5。但是PCIE总线的树形拓扑以及...
评分
回复
分享
chipdebug
4年前更新
91次阅读
关注
Lattice CrossLink-NX/Certus-NX FPGA 对PCIe的支持
PCIe
本文主要介绍Lattice近期发布的两款芯片对PCIe协议的支持,以及相关IP的使用方法和注意事项。
Lattice在19年底,发布了业界首款...
+1
评分
回复
分享
chipdebug
4年前更新
106次阅读
关注
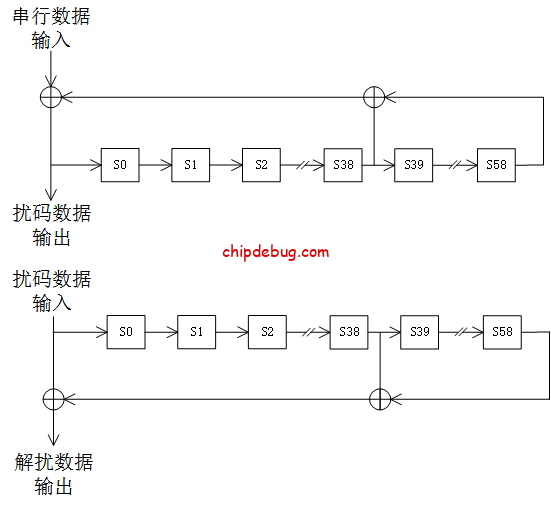
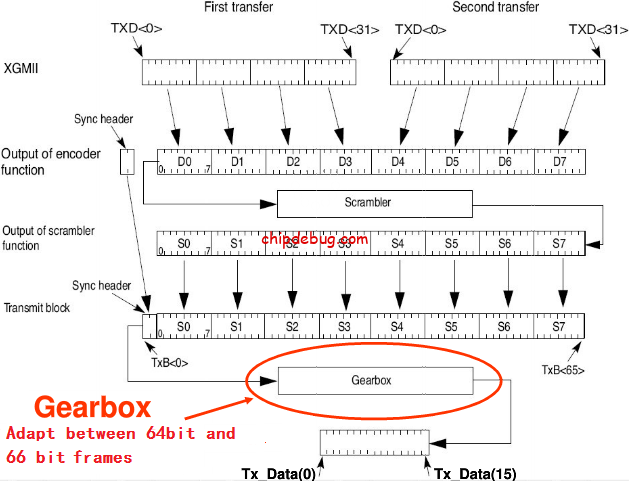
以太网扫盲——64b/66b编码
64b/66b编码技术是IEEE 802.3工作组为10G以太网提出的,目的是减少编码开销,降低硬件的复杂性,并作为8b/10b编码的另一种选择,...
+1
评分
回复
分享
chipdebug
4年前更新
80次阅读
关注
PCIe扫盲——PCIe简介
PCIe
PCI-Express是继ISA和PCI总线之后的第三代I/O总线,即3GIO。 由Intel在2001年的IDF上提出,由PCI-SIG(PCI特殊兴趣组织)认证发...
+2
评分
回复
分享
chipdebug
4年前更新
50次阅读
关注
PCIe扫盲——PCIe总线怎样做到在软件上兼容PCI总线
PCIe
前面的文章中多次说道,PCIe总线在软件上是向前兼容PCI总线的。因此,PCIe总线完整的继承了PCI总线中的配置空间(Configuration ...
+1
评分
回复
分享
chipdebug
2年前更新
284次阅读
关注
全网最全PCIE学习资料免费分享,FPGA实现PCIE必读文档!
该帖子部分内容已隐藏
付费阅读
已售 1
50
积分
黄金会员
40
钻石会员
30
登录购买
此内容为付费阅读,请付费后查看
评分
回复
分享
weakish
4年前更新
96次阅读
关注
FPGA经典开源项目
之前在github(https://github.com/troyguo/awesome-dv)上整理了一些开源的芯片类的项目,收获了很多人的点赞。这里再次拿出来分享给大家一起学习,共同进步,也欢迎大家到github上点star,或者有好的项目也欢迎提PR。Design/VerificationProjectIbex: http...
评分
回复
分享
yzllee
4年前更新
146次阅读
关注
基于 FPGA 的视频流人脸伪造设备
第一部分 设计概述(Design Introduction)
1.1 设计目的
近年来随着机器学习等技术的发展,人工智能在图像识别、语音处理等方...
+34
评分
回复
分享
jenmyliu
4年前更新
117次阅读
关注
基于 FPGA 及深度学习的人脸检测系统设计
第一部分 设计概述1.1 设计目的新冠病毒的肆虐让整个 2020 年笼罩在恐慌之中,戴口罩成了人们外出必备 的“新日常”。新冠病毒主...
+10
评分
回复
分享
上一页
1
…
8
9
10
11
下一页
跳转
37人已关注
分享
FPGA CPLD资料源码分享
发布
关注
帖子
314
互动
415
阅读
2.8W+
搜索
开启精彩搜索
最新的帖子
在手机上浏览此页面
登录
没有账号?立即注册
邮箱
验证码
发送验证码
记住登录
账号密码登录
登录
用户名/手机号/邮箱
登录密码
记住登录
找回密码
|
免密登录
登录
注册
已有账号,立即登录
设置用户名
手机号或邮箱
验证码
发送验证码
设置密码
重复密码
注册
注册即表示同意
用户协议
、
隐私声明
欢迎光临!
ChipDebug入站需知
如发现帐号发垃圾帖或垃圾评论的一律封号!
ChipDebug是一个芯片开发调试分享网站
欢迎您的到来!如果您没有帐户请先点击下方按钮进行
注册
登录
注册
找回密码
积分规则